自动驾驶落地难,到底难在哪里?
驾驶辅助不难,难在真正的自动驾驶,而这两者什么关系?这个等级就是划分它们的关键。
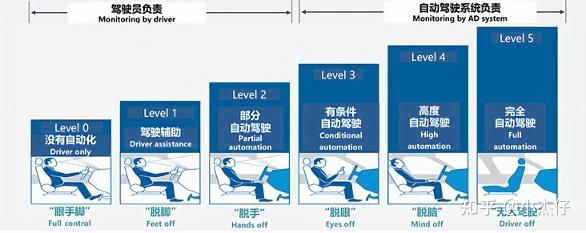
2016年的时候,美国那边有个叫国家公路交通安全管理局的,他们出了个关于自动驾驶的指导政策。这个政策挺重要的,因为它用了国际汽车工程师协会(SAE)的一套标准来给自动驾驶分级,从0到5,一共六个级别。

简单来说,1到5级就是看自动驾驶系统能自己搞定多少开车的事儿。到了3到5级,自动驾驶系统就能自己搞定所有开车的任务,不用司机操心。但在1到2级的时候,司机还得盯着自动驾驶系统,确保它表现正常。
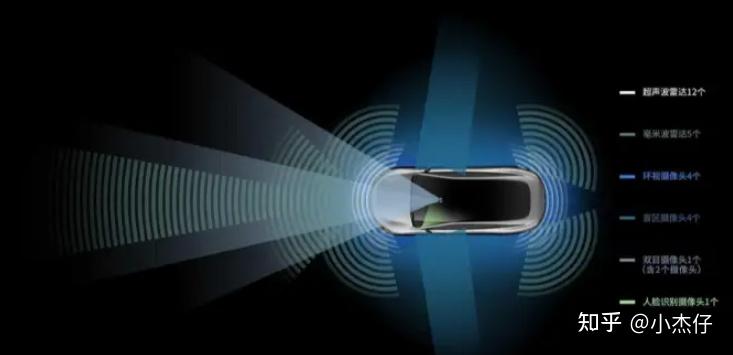
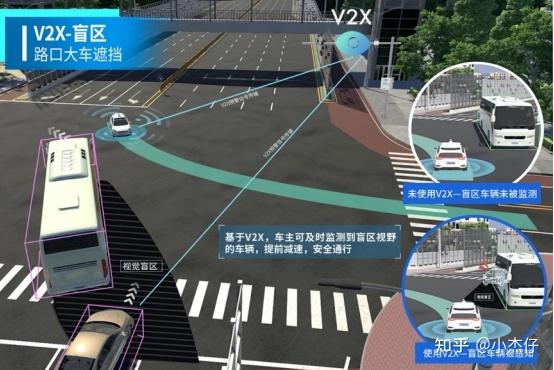
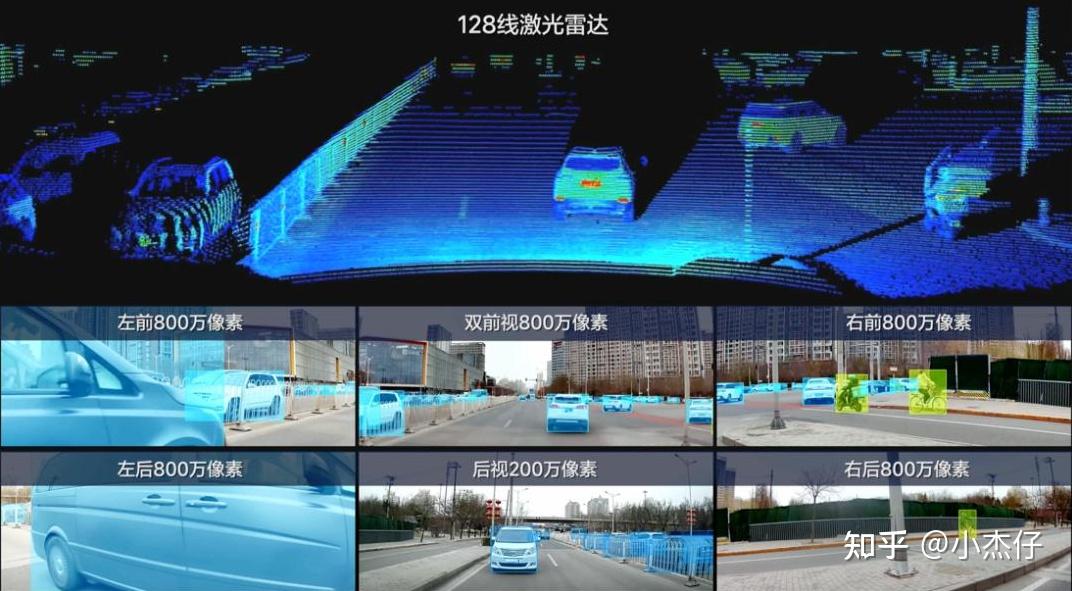
现在咱们说的L2级别的驾驶辅助,其实还主要靠摄像头和雷达来感知周围环境。但说实话,遇到复杂路况,这些系统还做不到完全没问题。要想实现那种完全不用人管的自动驾驶,我们得用上V2X技术,就是车和车、车和路上的设施能互相通信,还得有云数据和云计算来提供实时信息。
在中国这种复杂的路况下,自动驾驶系统有时候也会摸不着头脑。比如GPS信号弱,或者天气变化大,这些都可能让车子定位不准。还有,传感器要是不稳定,或者周围环境太吵,可能就检测不到障碍物,这样撞车的风险就大了。所以,为了让自动驾驶汽车既安全又靠谱,我们得好好调校和优化这些系统。
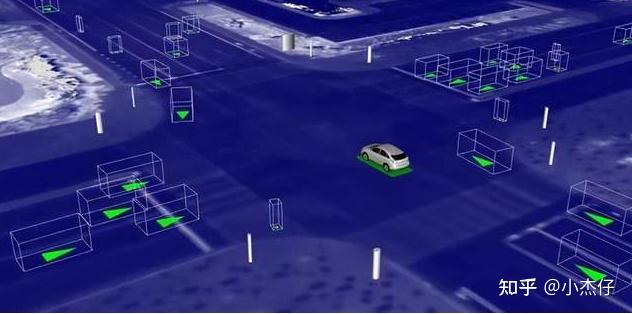
感知和定位技术对自动驾驶系统来说特别关键,它们的表现直接关系到地图的精确度。虽然雷达在扫描的时候可能会因为噪声出错,或者因为扫描有间隔,可能会漏掉一些信息,但这些问题都可以通过技术手段来解决。
还有,通信系统的不确定性也给自动驾驶带来了不少挑战,尤其是在理解其他交通参与者的意图时,这种不确定性可能会让系统反应慢半拍。不过,通过技术改进,这些问题也能被有效管理。但是,控制模块还是面临挑战,因为它对噪声很敏感,而且受到运动模型的限制,这可能会让车辆在短时间内达到预期的速度和加速度变得困难。
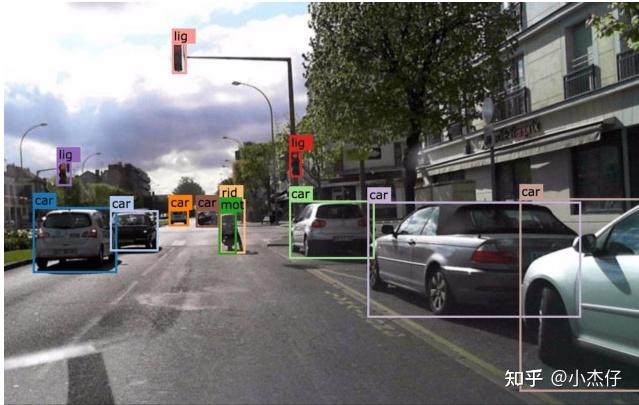
在感知能力方面,系统在检测小型障碍物时也可能会出现问题。这里说的小型障碍物,不光是体积小的东西,还包括那些虽然体积大,但在车辆前进方向上投影面积小的物体。比如纸箱、木块、三角锥桶、塑料袋等等,这些东西形状各异,给人工智能的视觉识别模型带来了挑战,因为要训练这些模型,需要大量的数据。
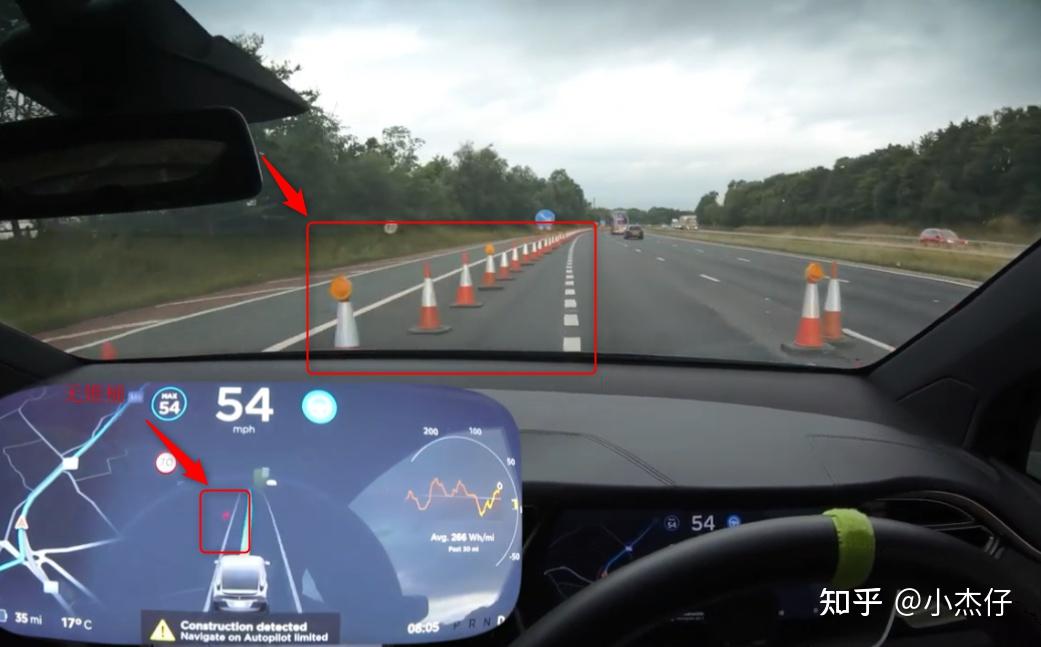
而且,因为这些障碍物体积小,位置又靠近地面,可能会导致毫米波雷达和激光雷达只能收到很少的回波信息或者点云信息。这样,这些物体可能会被算法误认为是噪声,然后被过滤掉,导致传感器很难准确识别它们。